
![[.co] 世界で最も短いt.coやg.coなどの一文字+.coを使用しているwebサイトを全てまとめてみた!](https://i0.wp.com/blog.enotai.com/wp-content/uploads/2015/04/t.co_.png?fit=300%2C180&ssl=1)




![【Terastation】 新旧[TS-WXL]と[TS-5200D]について違いを考察してみる&分解レポ](https://i0.wp.com/blog.enotai.com/wp-content/uploads/2015/11/terastation-compare-open-door.jpg?fit=224%2C300&ssl=1)
Zumo 32U4をMacで動かしてみます。
Arduinoにタイヤがと各種センサが付属したロボットでUSBでパソコンに接続し、簡単に開発を始めることができます。
中身はArduinoなので基本的にArduino IDEで開発を行いますが事前に設定がいくつか必要なので紹介します。
- A-Starドライバの導入
- ヘッダファイルの読み込み
以上の二点の設定が必要となります。
ここではZumo 32U4を接続した状態で検証しています。
Pololu A-Star 32U4ドライバの導入
A-Star 32U4のドキュメントに沿ってドライバを導入していきます。
Boards Managerによるドライバの導入
メニューバーの「Arduino」→「Preferences」よりBoards Managerに使用するURLの記述を行います。
「https://files.pololu.com/arduino/package_pololu_index.json」と記述しましょう。
すでに記述が行われている場合は右端のウィンドウボタンよりテキストボックスを開き、改行してURLを追加します。

記述が終わったら「Tools」→「Board:~」からBoards Managerを起動。
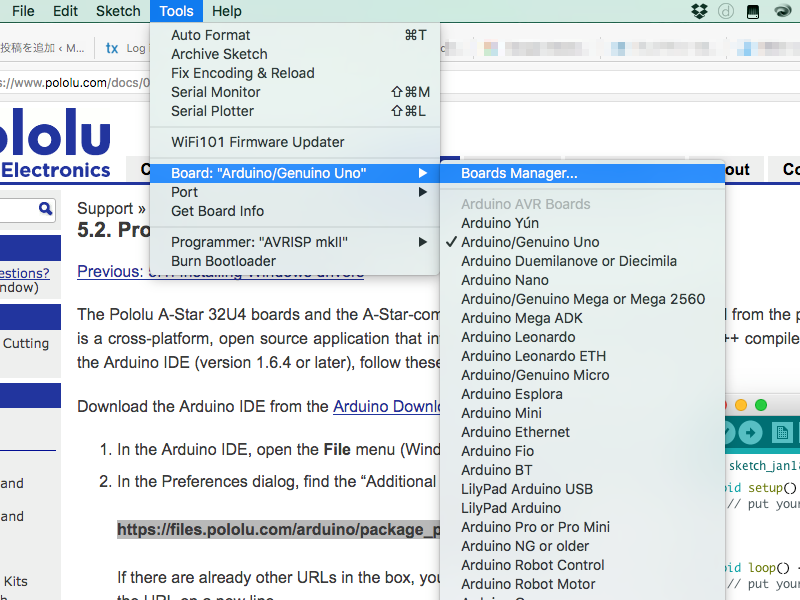
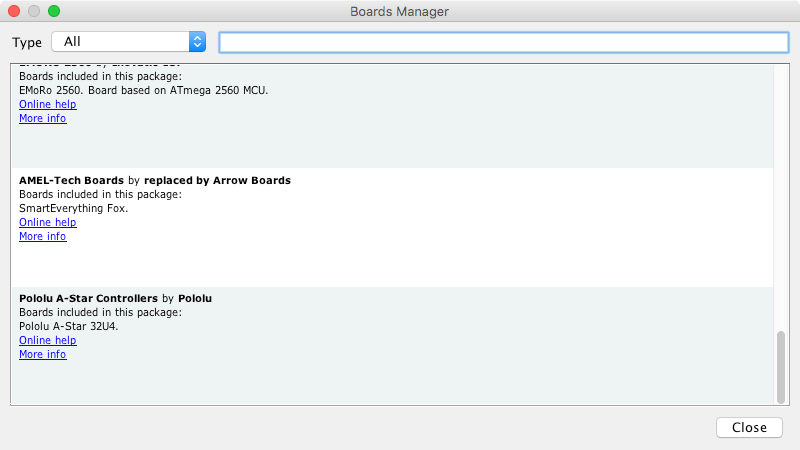
下部の「Pololu A-Star Controllers」をクリックし、インストールを行います。
インストールが完了するとメニューにA-Star 32U4が登場するので選択します。
Portも「/dev/cu.usbmodem*」と書かれたものを選択しましょう。

Zumo 32U4ライブラリの導入
https://github.com/pololu/zumo-32u4-arduino-library
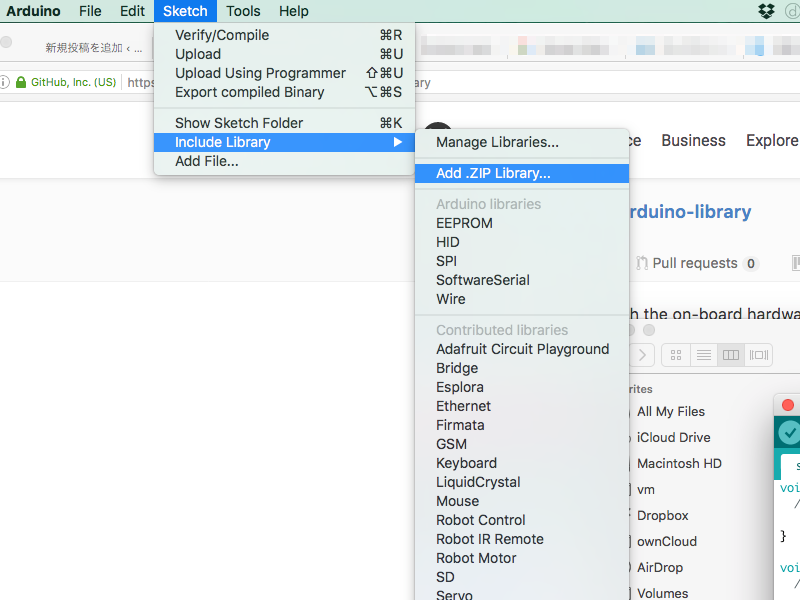
Zipのまま渡してしまいましょう。
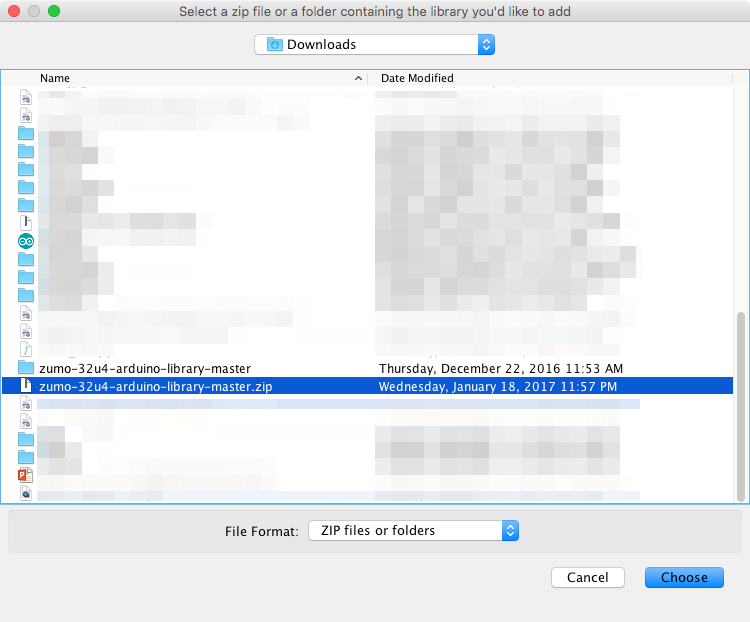
以上で設定は完了です。Cloneしたファイルの中にexamplesがあるので遊んでみましょう。「Demo.ino」 を書き込めば一通りの動作を体験することができます。よいZumoライフを!


![[Mac] 新しく登場したMacBookは今までのMacとどう違うのか?](https://i2.wp.com/blog.enotai.com/wp-content/uploads/2015/03/macbook.png?resize=150%2C150&ssl=1)

![[.co] 世界で最も短いt.coやg.coなどの一文字+.coを使用しているwebサイトを全てまとめてみた!](https://i0.wp.com/blog.enotai.com/wp-content/uploads/2015/04/t.co_.png?resize=150%2C150&ssl=1)
![[Unix] 管理者権限をもらって初めてsudoするときに出てくるメッセージとは!?](https://blog.enotai.com/wp-content/uploads/2020/05/noimage.gif)
